The evolution from motion capture and teleoperation to robot skill learning has emerged as a hotspot and critical pathway for advancing embodied intelligence. However, existing systems still face a persistent gap in simultaneously achieving four objectives: accurate tracking of full upper limb movements over extended durations (Accuracy), ergonomic adaptation to human biomechanics (Comfort), versatile data collection (e.g., force data) and compatibility with humanoid robots (Versatility), and lightweight design for outdoor daily use (Convenience). We present a wearable exoskeleton system, incorporating user-friendly immersive teleoperation and multi-modal sensing collection to bridge this gap. Due to the features of a novel shoulder mechanism with synchronized linkage and timing belt transmission, this system can adapt well to compound shoulder movements and replicate 100% coverage of natural upper limb motion ranges. Weighing 5.2kg, NuExo supports backpack-type use and can be conveniently applied in daily outdoor scenarios. urthermore, we develop a unified intuitive teleoperation framework and a comprehensive data collection system integrating multi-modal sensing for various humanoid robots. Experiments across distinct humanoid platforms and different users validate our exoskeleton's superiority in motion range and flexibility, while confirming its stability in data collection and teleoperation accuracy in dynamic scenarios.
The the NuExo can be divided into the following major components: the upper limb exoskeleton main body, the manipulated humanoid robot, the visual display and acquisition module, and the control and battery unit. As the core of the system, the upper limb exoskeleton integrates shoulder, elbow, wrist, and hand-mounted data glove modules. The total weight of the exoskeleton is 5.2 kg and is made mainly of carbon fiber plates and 3D printed PLA plastic components.
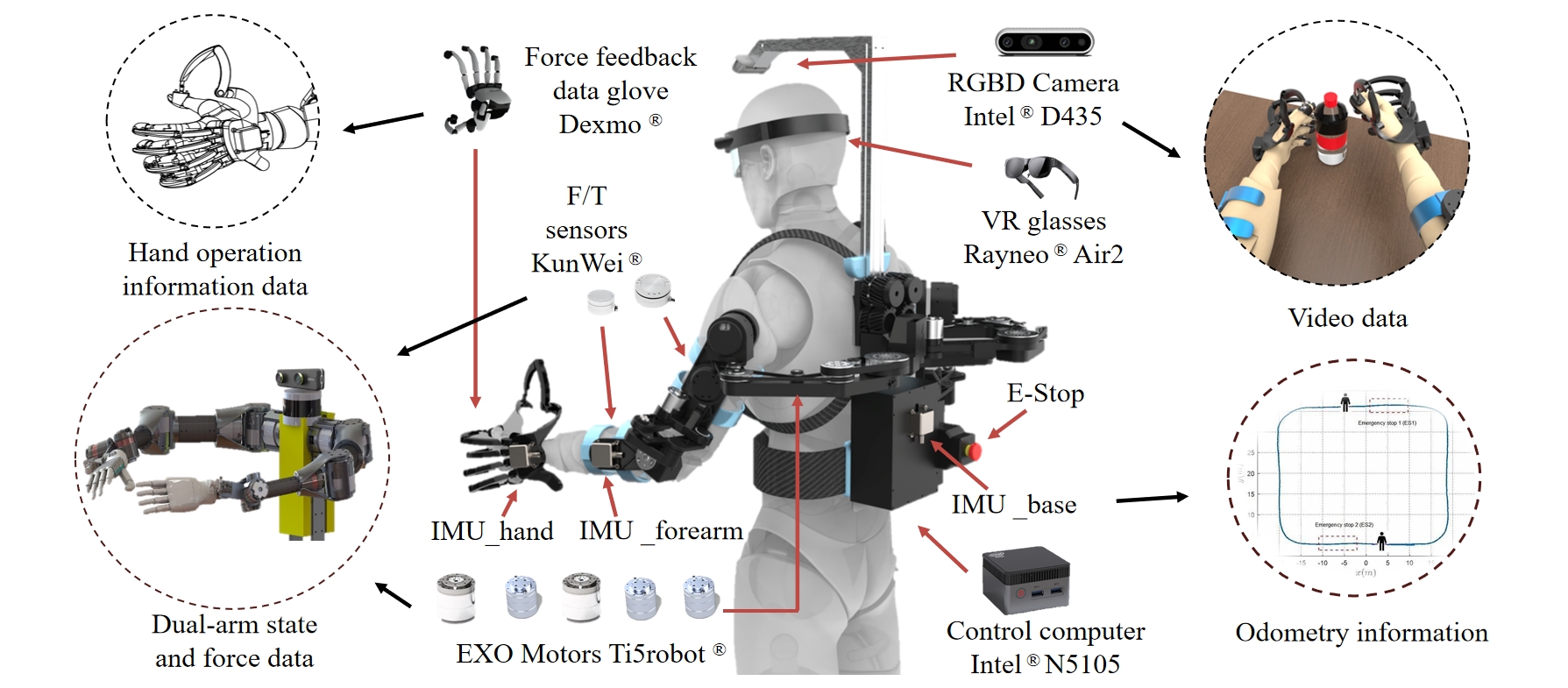
The sky-blue parts of the arm in the model
denote binding interfaces housing six-axis force sensors, which connect users to the exoskeleton.
These sensors collect upper limb kinetic data during operation-a feature absent in most existing systems-and
synergize with our collaborative control algorithm to enable floating assistive motion, significantly
enhancing operational flexibility.
This system uniquely supports simultaneous acquisition of:
(1) robotic teleoperation data, (2) human upper limb kinematic data, (3) first-person-view motion videos,
(4) finger motion data, (5) odometry data, (6) upper limb force feedback.
To our knowledge, this represents the most comprehensive multimodal data collection platform for humanoid robot upper limb
studies, with outdoor mobility further expanding its spatial and temporal scalability.
The NuExo is ergonomically designed to fit well with the human arm while being lightweight, allowing wearers to comfortably use
the NuExo in daily life scenarios. The richness of NuExo usage scenarios also improves the richness of data, brings more possibilities
to learning algorithms
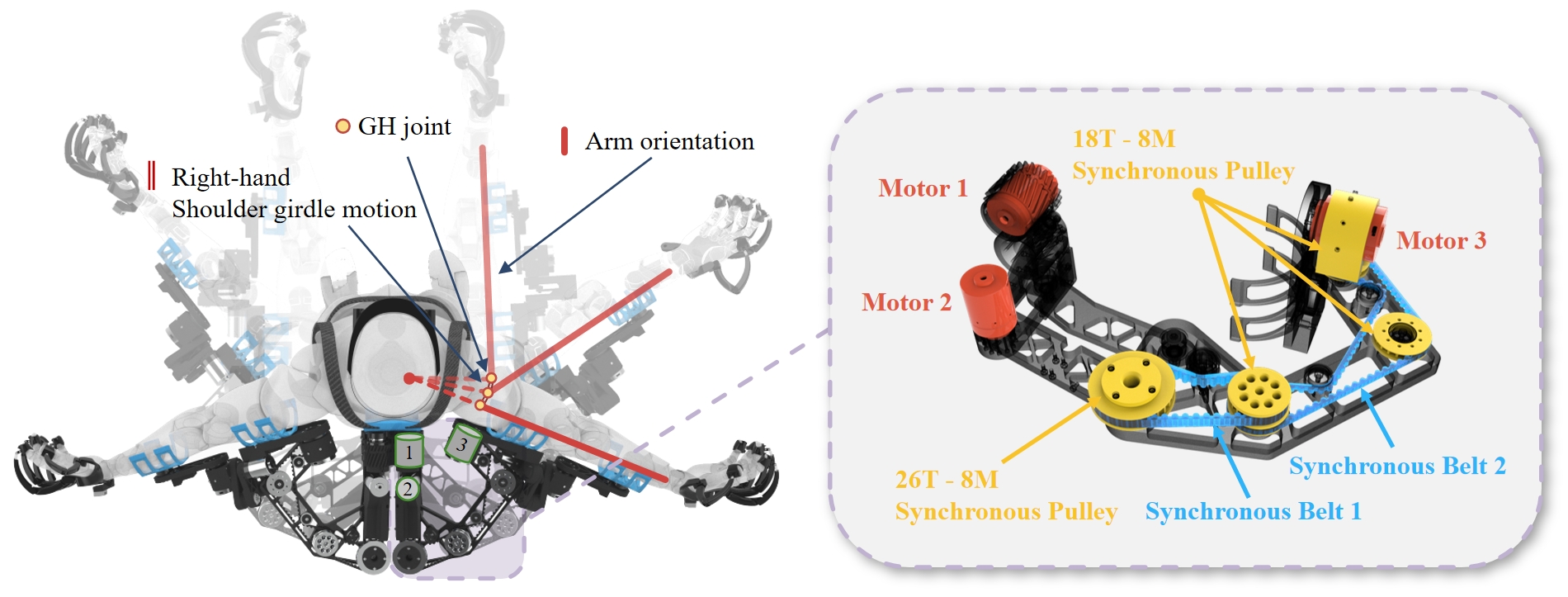
The human shoulder can be conceptualized as a spherical hinge structure with three degrees of freedom.
The geometric center of this spherical hinge is commonly regarded as the Glenohumeral (GH) joint.
Nevertheless, during natural human movement, this geometric center is not stationary relative to the body but
rather exhibits a certain degree of movement freedom. Most exoskeleton systems have neglected this aspect,
leading to a misalignment between the shoulder movement center of the exoskeleton and GH joint.
Our findings indicate that the horizontal movement of the GH joint is closely associated with the movement of
the upper arm. When the human upper arm rotates naturally without deliberately moving the shoulder,
GH joint will also move accordingly. This observation suggests that one DOF of the shoulder spherical hinge and the
DOF of the forward (or backward) movement of GH joint are not entirely independent, but rather have a mapping relationship.
Consequently, we can utilize a mechanical transmission structure to combine these two degrees of freedom into one.
By doing so, we can reduce the number of driving motors without sacrificing the tracking performance,
ultimately decreasing the weight of the exoskeleton.
⟹ Move the slider to see the motion
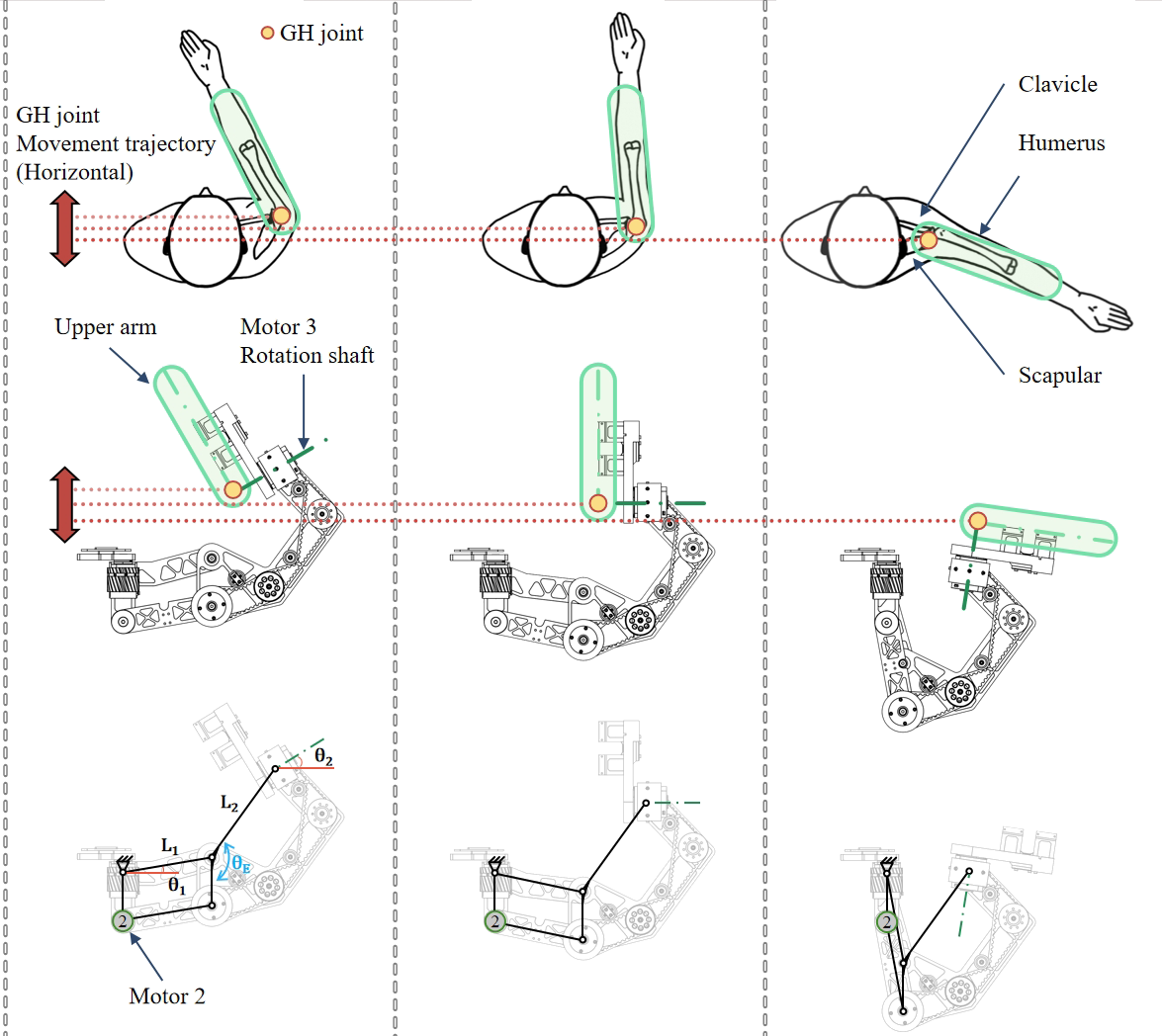
NuExo tracks the GH joint horizontally (Shoulder Flexion/Extension)
In addition to the protraction-retraction movement, GH joint also undergoes elevation-depression movement when the arm is raised. To compensate for this movement, we have designed the structure shown below. This structure allows the exoskeleton to adapt to the dynamic changes in the vertical position of GH joint.
⟹ Move the slider to see the motion
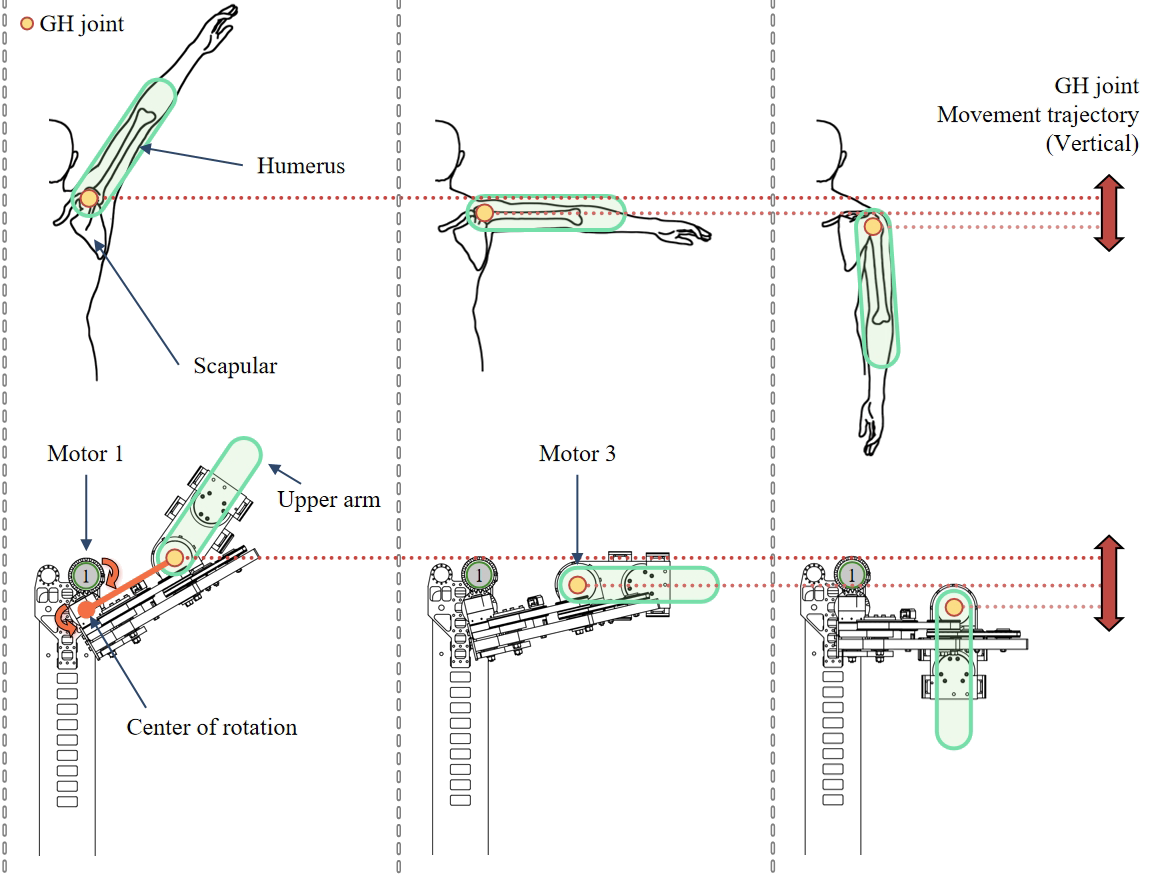
NuExo tracks the GH joint vertically (Shoulder Adduction/Abduction)
We reposition a motor of the shoulder joint to the elbow.
This strategic relocation effectively eliminates the potential interference between
the motor and the human head during arm elevation, a common issue in many conventional designs.
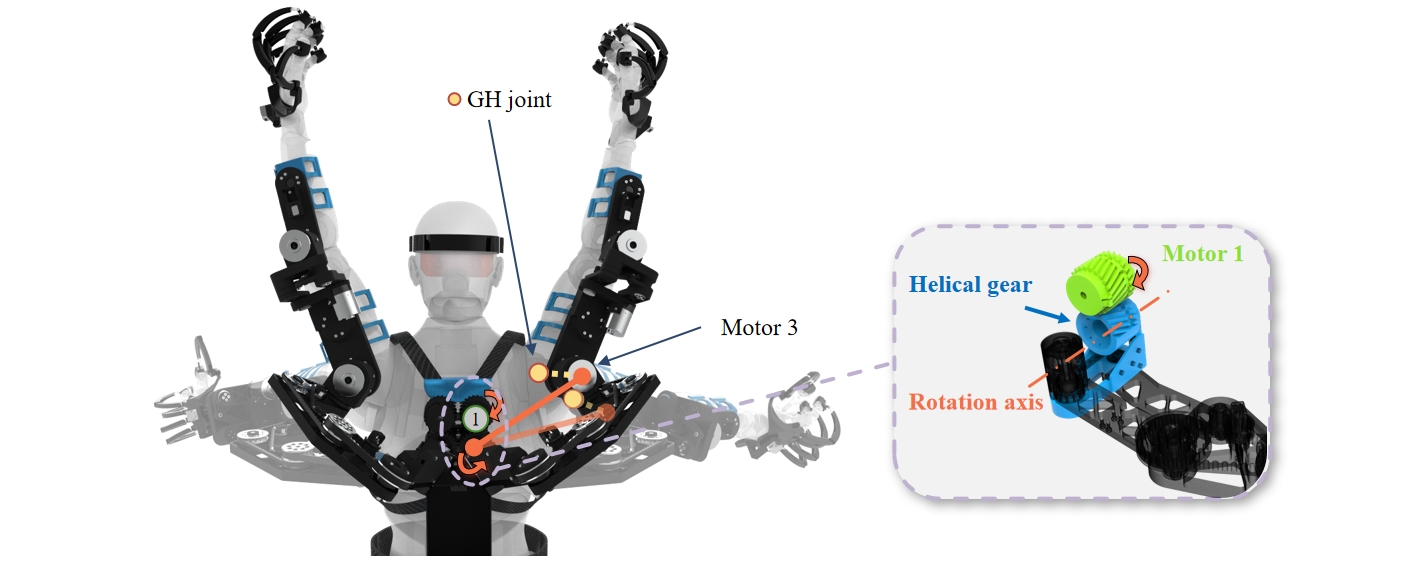
⟹ Move the slider to see the motion
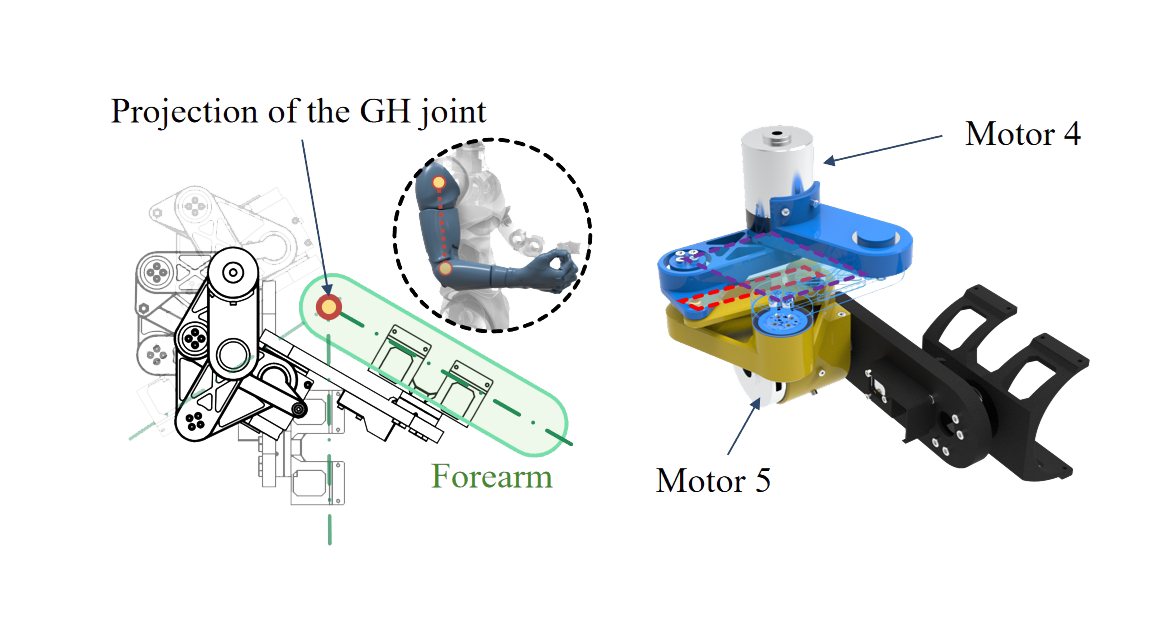
NuExo tracks the GH joint at the elbow (Shoulder Interior/Exterior Rotation)
These three innovative approachenables us to utilize only one motor on the shoulder. In contrast, traditional
exoskeleton systems equipped with three actively driven degrees of freedom in the shoulder lack such a
streamlined and efficient design. Through this distinctive design, our exoskeleton attains an
impressively wide ROM.
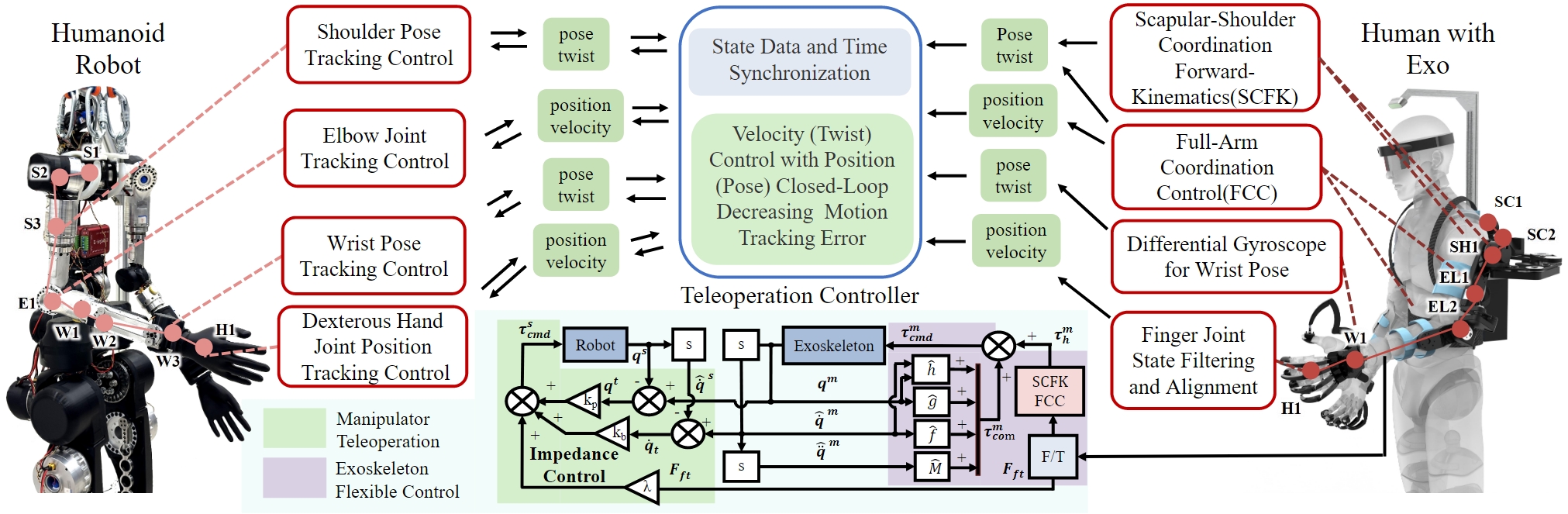
The control system software comprises four modular components: exoskeleton node, humanoid robot node, teleoperation controller node, and low-level driven node of the humanoid robot. By changing the low-level driven node of the humanoid robot, it can control another humanoid robot; by concurrently opening multiple identical control nodes, it can control several robots simultaneously.
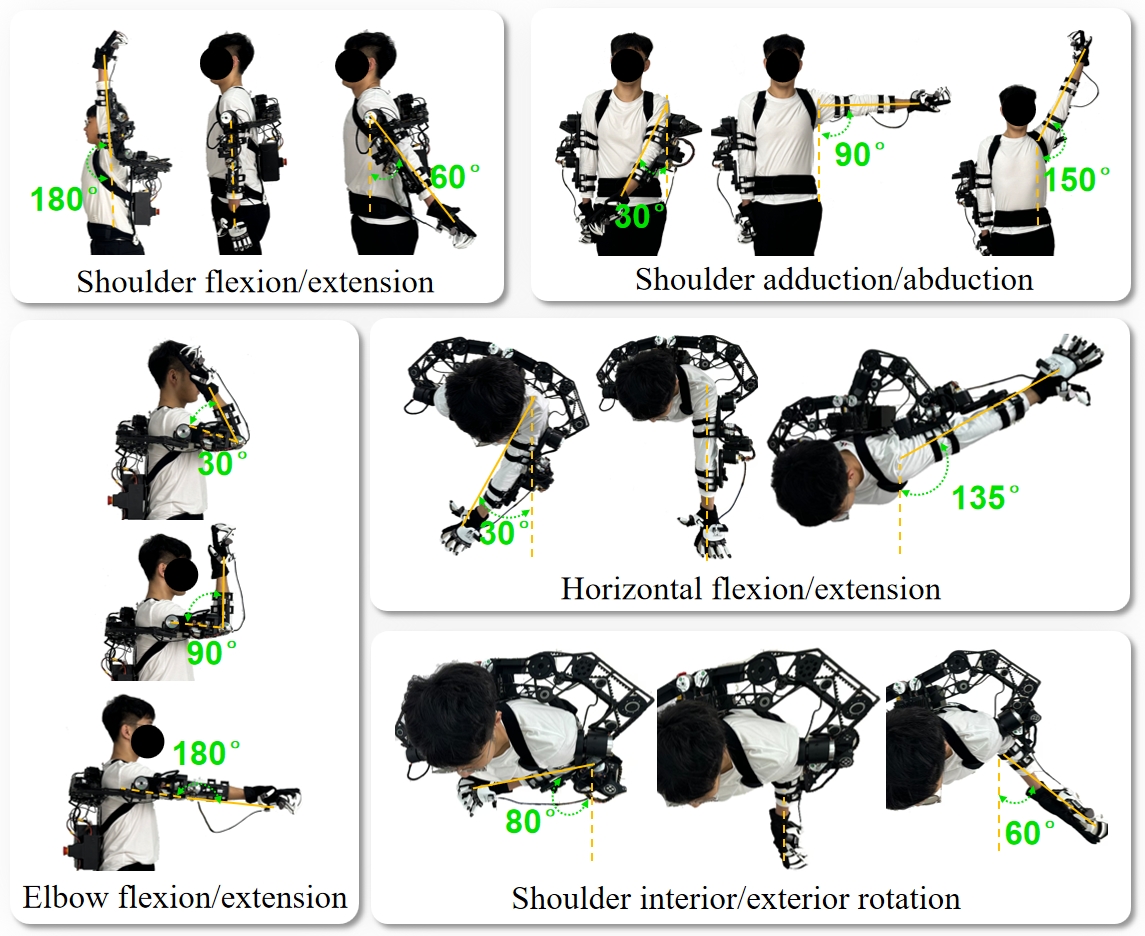
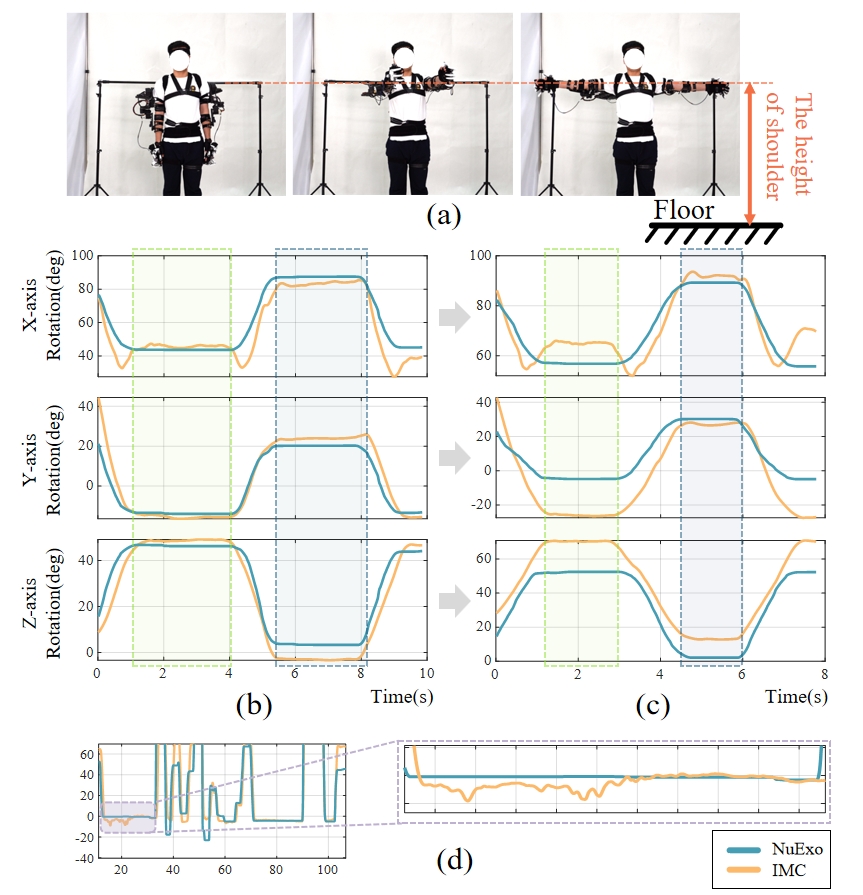
When wearing NuExo, user's shoulder can achieve 180° of flexion and 60° of extension, 30° of adduction and 150° of abduction. User can easily raise their arms above their heads. Horizontal flexion and extension can reach 30° and 135° respectively. In the video, we demonstrated that it can still reach the abovementioned ranges when performing circular motions. The results demonstrate that the exoskeleton preserves substantial upper limb ROM when worn, including all of the natural arm movement patterns.
As a motion capture device, NuExo is capable of collecting a wealth of human task operation data.
This includes:
▶ The position and velocity data of a single arm with 9 DOF (2 DOF for the GH joint
+ 3 DOF for the shoulder + 1 DOF for the elbow + 3 DOF for the wrist);
▶ The grasping data of a single palm with 6 degrees of freedom;
▶ The posture data of the waist with 3 DOF;
▶ First - person video information and depth data;
▶ inertial odometry data;
▶ The six - dimensionaldata of the interaction force between the upper arm, forearm and NuExo.
Inertial motion capture (IMC) system is one of the few devices that can provide untethered operation, extended mobility, portability, and multi-joint pose tracking, similar to our exoskeleton. Therefore, we conduct a comparison experiment on the data collection accuracy between NuExo and a commercial IMC system. Experimental results show that NuExo demonstrates better performance than IMC in long-term data stability, data accuracy, and signal noise.
With the NuExo, the operator can control the robot to use an electric screwdriver to tighten a screw (the diameter of the screw head is merely 2.5 mm). The operator is even able to control the switch of the electric screwdriver with fingers. In high-dynamic motion tracking experiments, operators can also maneuver the robot to accurately throw a ball into a box located 1.2 meters away. We let different operators utilize the NuExo to control various robots for the completion of the different tasks, the operators could effortlessly finish the task without undergoing prior training. NuExo enables direct utilization of the human arm, which is the most dexterous manipulator in nature, as a controller to guide robots through sophisticated operations.
In this paper, we present an innovative development: a lightweight, backpack-style exoskeleton robot, along with the construction of a generalized immersive humanoid robot teleoperation system and an upper limb multi-modal data collection system. Our ingenious shoulder design has completely solved the problem of motor placement at the shoulder joints of active exoskeletons that consider shoulder anatomy. This enables the key concept (shoulder anatomical motion compensation) of the upper limb exoskeleton to be developed in a backpack-type design for the first time. According to the experiments, the ROM of the user's upper limbs and their daily movements remain unaffected when wearing NuExo. This verifies the comfort and the effectiveness of our exoskeleton design. Moreover, users can operate different humanoid robots to complete complex tasks without training, which validates the versatility and superior teleoperation ability of NuExo. Its data accuracy and long-term stability have been confirmed through operational data collection comparison, and our multi-modal sensing data (integrated force) is more comprehensive than that of the existing operation device. In the future, we intend to explore the effectiveness of combining various types of data in the skill learning of humanoid robots.
@article{zhong2025nuexo,
title={NuExo: A Wearable Exoskeleton Covering all Upper Limb ROM for Outdoor Data Collection and Teleoperation of Humanoid Robots},
author={Rui Zhong and Chuang Cheng and Junpeng Xu and Yantong Wei and Ce Guo and Daoxun Zhang and Wei Dai and Huimin Lu},
journal={arXiv preprint arXiv:2503.10554},
year={2025}
}

